欢迎来到天津华茂致远自动化科技有限公司网站!

 185-12233227
185-12233227



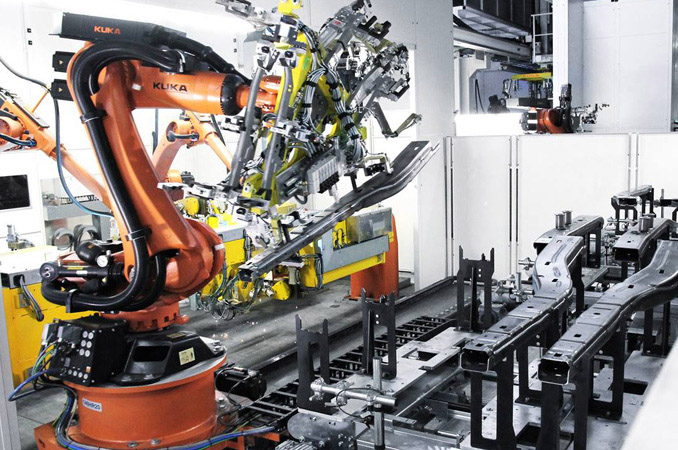
工业搬运机器人是一种自动化设备,主要用于各种生产过程中的物品捡拾、移动和放置。其工作原理主要基于机器视觉技术和伺服驱动技术来实现自主导航和控制操作过程
首先,它们使用高分辨率的相机来捕工作环境中的图像信息并转化为数字信号进行分析和处理.然后根据预定的路径规划出优化的行动轨迹来完成任务目标.在这个过程中,他们还需要对周围的环境进行感知和分析以防止碰撞或干涉到其他物体。同时,他们还配备有多种传感器如激光雷达、深度摄像头等来进行环境建模以及障碍物的检测与规避以确保在复杂环境中稳定运行和工作安全。。







自动搬运机器人是一种能够自动完成物料搬运任务的机器人,具有、准确、可靠等特点,广泛应用于工业、物流、等领域。自动搬运机器人的功能如下:
自动定位:自动搬运机器人可以通过激光雷达、视觉传感器等技术实现自动定位,从而准确地找到物料的位置。
自动搬运:自动搬运机器人可以通过机械手臂等技术实现自动搬运,从而、准确地将物料搬运到位置。
自动码垛:自动搬运机器人可以通过机械手臂等技术实现自动码垛,从而有效地提高物料的搬运效率和准确性。


物料搬运机器人是一种能够自动完成物料搬运任务的机器人。其工作原理如下:
控制系统:物料搬运机器人的控制系统是整个机器人的,它负责接收外部信号,根据信号指令控制机器人的运动和操作。
机器人本体:物料搬运机器人的机器人本体包括机器人的机构、驱动系统、传感器等部件。机构负责机器人的运动和操作,驱动系统负责机器人的动力,传感器负责机器人的感知和定位。
搬运工具:物料搬运机器人的搬运工具包括各种搬运器具,如手推车、叉车等。搬运工具负责将物料从一个地方搬运到另一个地方。



扫一扫手机网站






 在线客服
在线客服 185-12233227
185-12233227 litao_llt@163.com
litao_llt@163.com